
Portable quadcopters is the latest design interest of John Middendorf. Trained as a mechanical engineer at Stanford University, and after spending of life exploring the world’s mountains and rivers, the initial interest in quadcopters arose from imagining what it would have been like to have had a full feature FPV quadcopter exploring some of the world’s most remote places. Sometimes, for example, it would take days to find the optimal route through a Karakoram glacier en route to a big wall climb; with a FPV quadcopter, reconnaissance would have been fast and easy!
Now John Middendorf is a full time teacher of mathematics, science, and robotics in Tasmania. More information on his previous design work can be found on bigwalls.net, bigwalls.net/OtherD4Design. Thank you for your interest.
To contact John, or if you have any questions, send an email to:
deuce4@bigwalls.net.
Here’s some background on the design origin:
Please reference according to Open Source GPL license John Middendorf and Porta-Quad as the original designer if used for commercial purposes. Here are images of the design files:

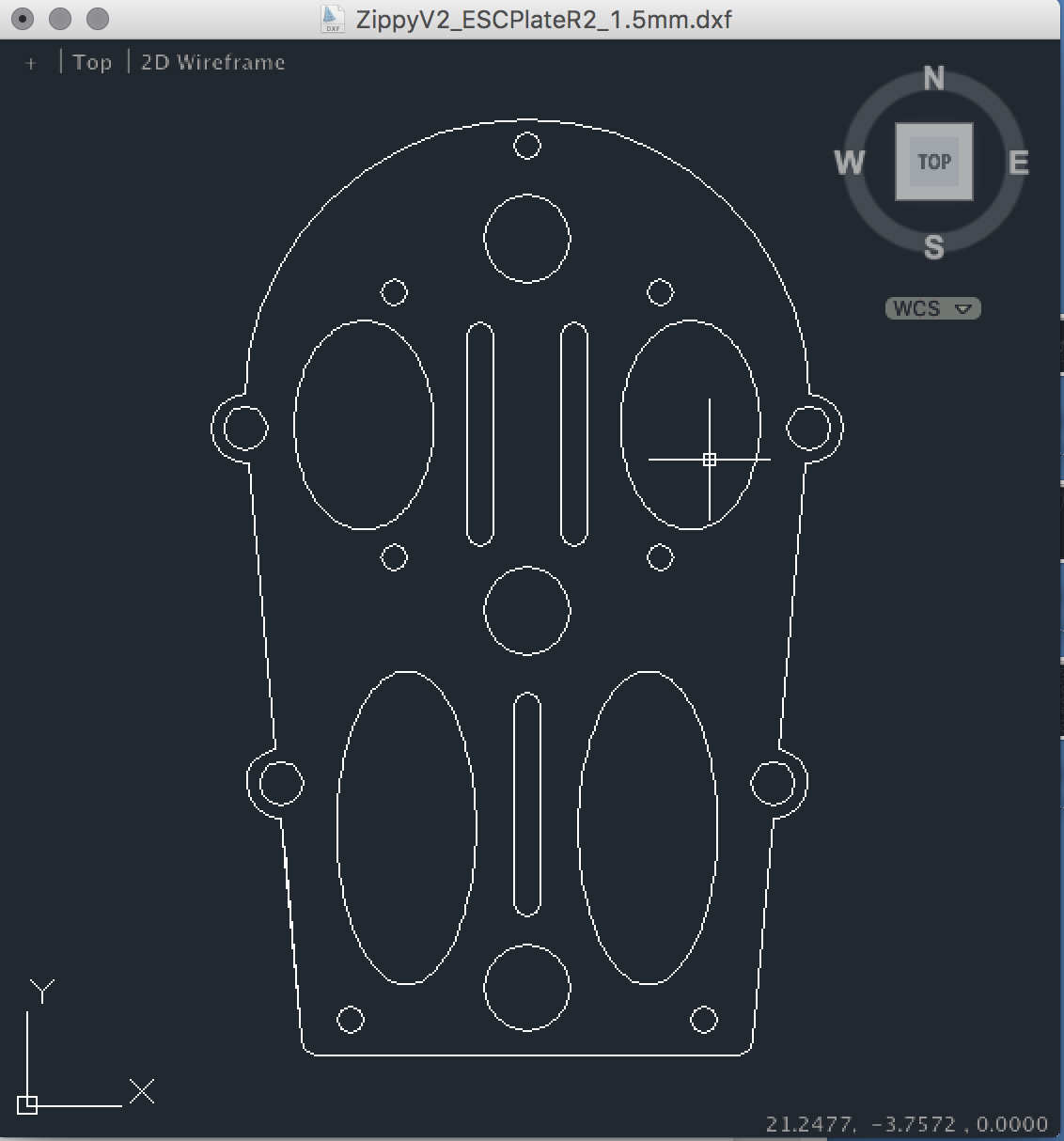


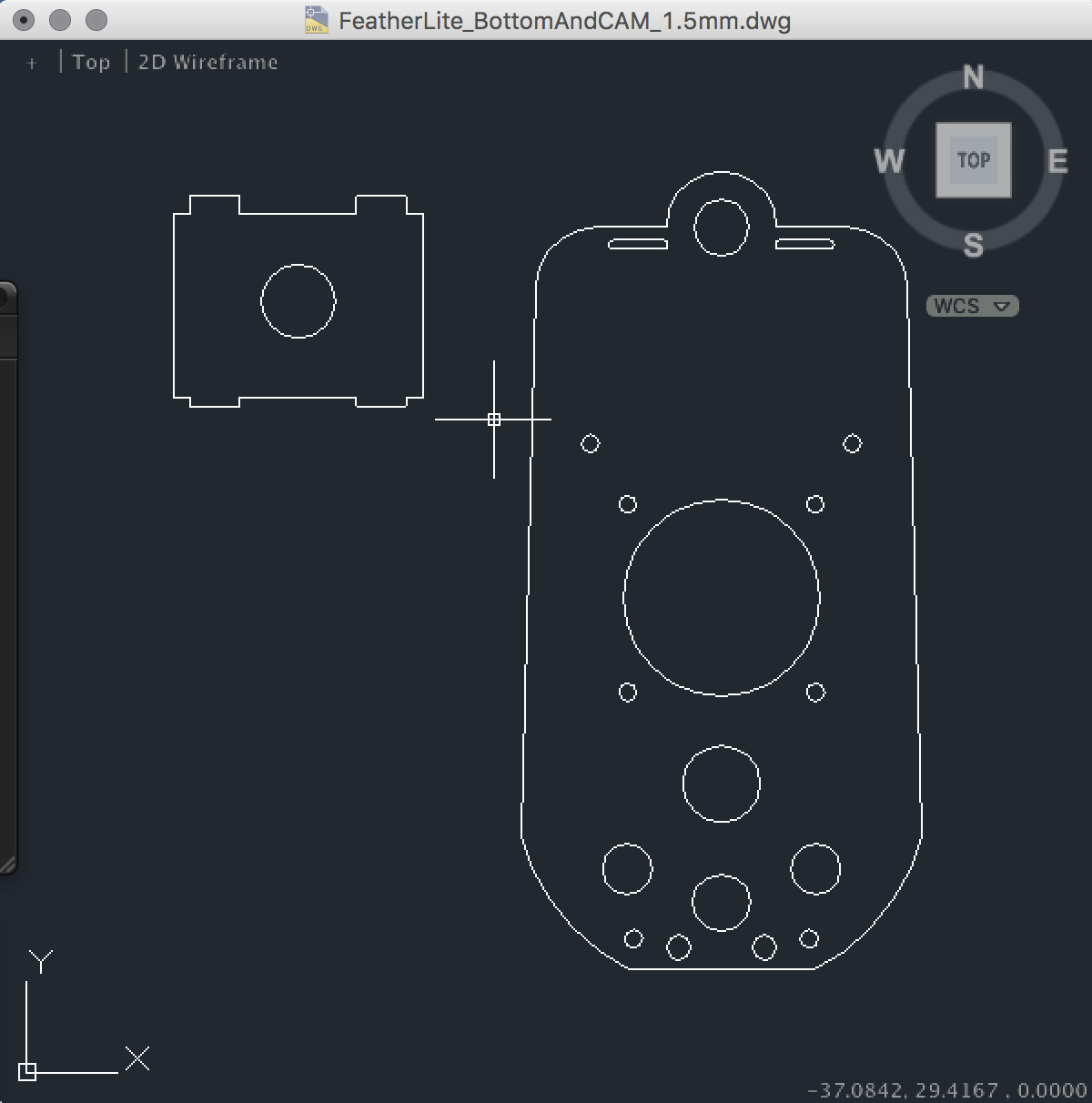

And here are the DXF CAD files: